Inverted Pendulum
Real-time embedded control and firmware development on a physical control system.
Learn moreSTM32 + BNO055 firmware streaming orientation data into a Python desktop stack for virtual gantry replay.
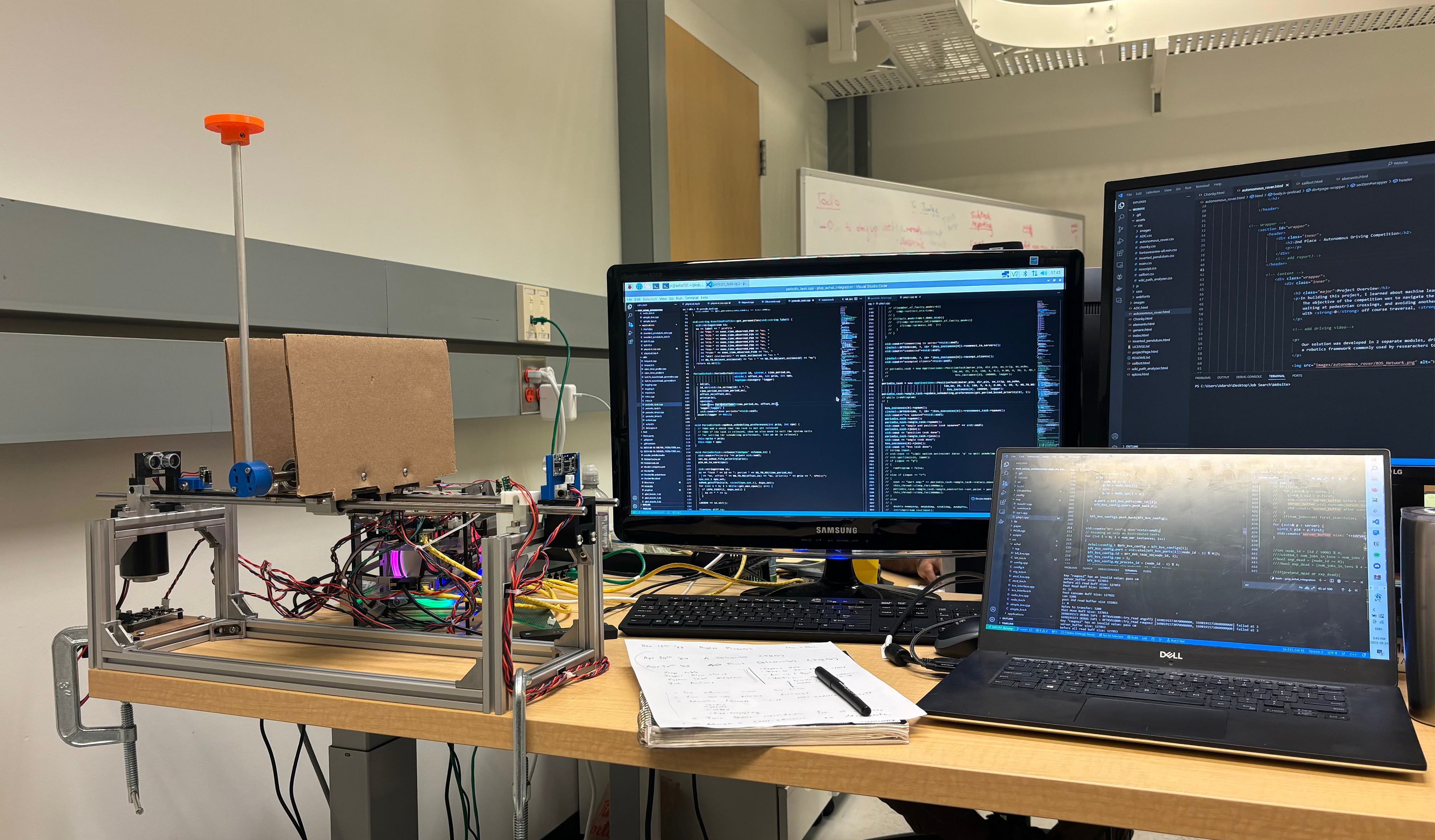
This project captures motion from an IMU and reproduces the motion on a 3-axis gantry system. An STM32F446RE reads orientation and motion data from a Bosch BNO055 over I2C, then streams measurements over UART/USB serial to desktop software. The desktop application records, visualizes, and converts that data into trajectories that can be replayed on a virtual gantry and eventually physical hardware.
The system was built as a hardware-software pipeline so each piece could be debugged independently: sensor acquisition on the microcontroller, frame parsing and control mapping on the desktop, then trajectory conversion and command execution on the gantry interface.
I implemented the firmware flow for IMU acquisition and reliable serial streaming on STM32. That made orientation telemetry validation and downstream desktop integration significantly easier.
I built a desktop toolkit in Python for live IMU monitoring, control, and trajectory replay. The stack includes scripts for real-time Euler visualization, live control mapping, a unified control/plotting app, and trajectory conversion utilities to drive the gantry system.
To improve trajectory quality from integrated acceleration, I implemented and evaluated several drift-reduction techniques: high-pass filtering, ZUPT (zero velocity updates), and rest-bias correction. The plots below show before/after comparisons from the project writeup.
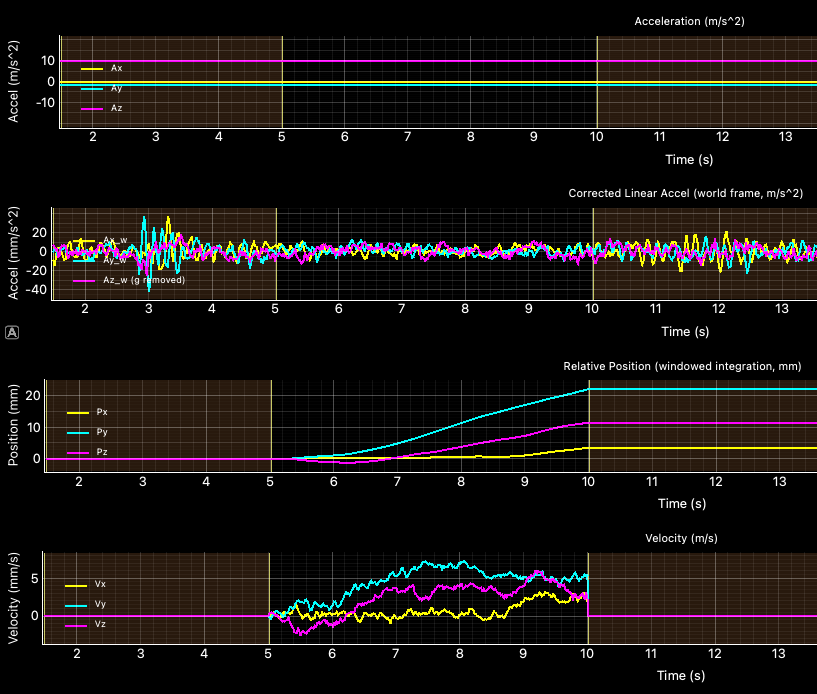
Before ZUPT
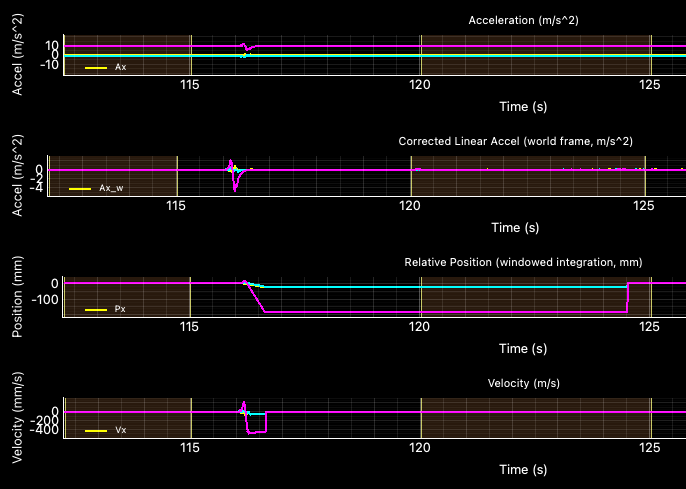
After ZUPT
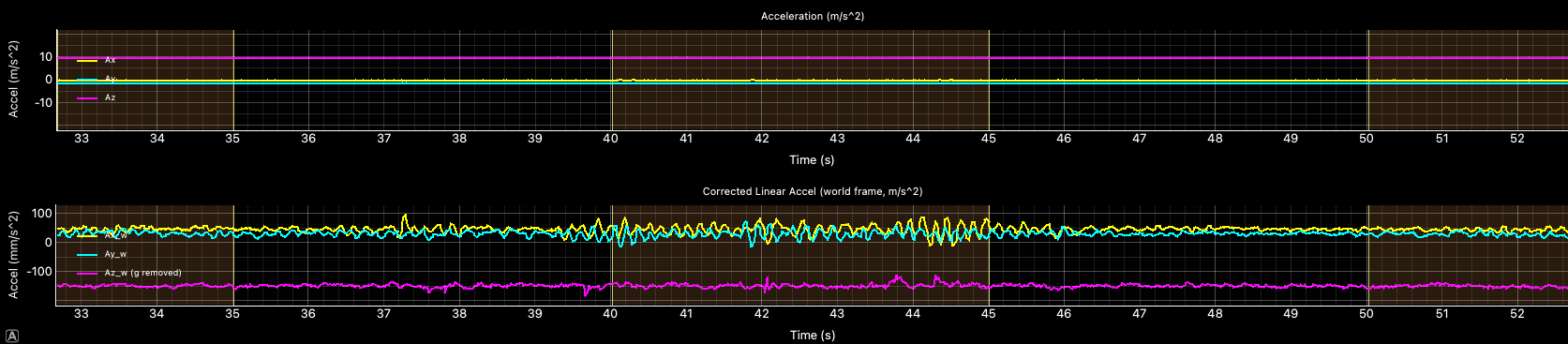
Before Rest Bias Correction
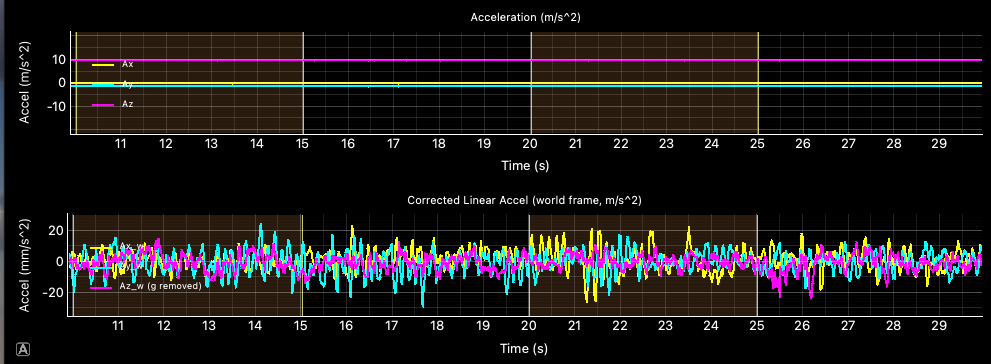
After Rest Bias Correction
This project was a strong end-to-end embedded systems exercise across sensor interfaces, firmware telemetry, desktop tooling, and motion-control integration. It reinforced the importance of observability and staged integration when building cross-platform robotics systems.
Real-time embedded control and firmware development on a physical control system.
Learn more
STM32 flight firmware, FreeRTOS architecture, and ground station software for autonomous aircraft.
Learn more